Jump to video!
The relation between the models was the windup mechanism and that they were arthropods: a crab with walking movement, a dragonfly with flapping wings and a caterpillar with crawling motion.
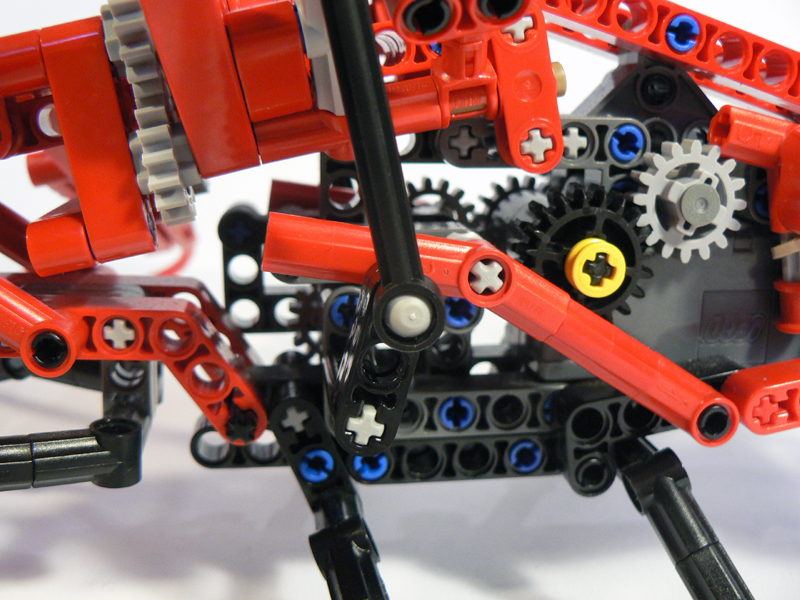
The wind-up mechanism was achieved with a pullback motor. To use a pullback motor as a windup mechanism, a windup knob with ratcheting and a trigger mechanism had to be added. In typical windup mechanisms, the trigger is some kind of torque limiter that fully disengages the ratchet when the torque limit is reached. In the models, the triggering was simply done by pulling the windup knob and windup gear out from between the ratchet and the pullback motor's input gear, letting it spin up.
My first concept was to use the same wind-up module in all models but due to the short deadline, I couldn't optimize the module.
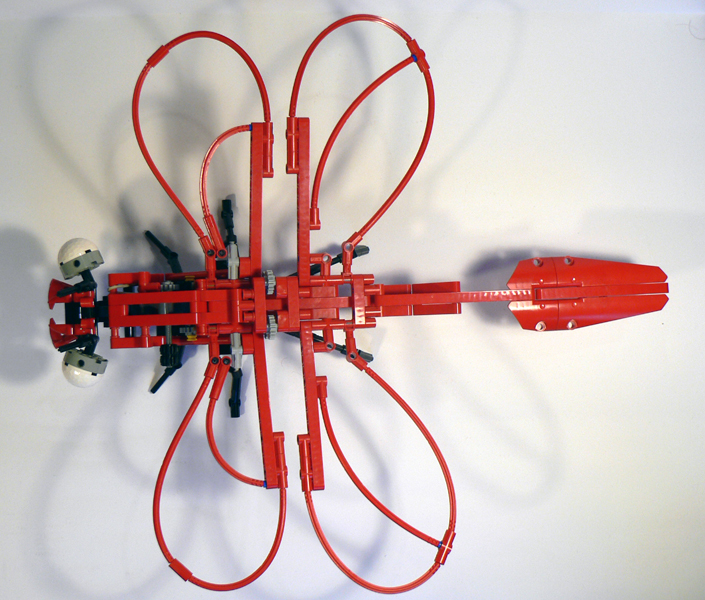
Dragonfly
Features:- working contra-flapping wings
- wind up propulsion
- posable head
Model details:
- part count: 414
- size: 46 x 41 x 10,5 cm


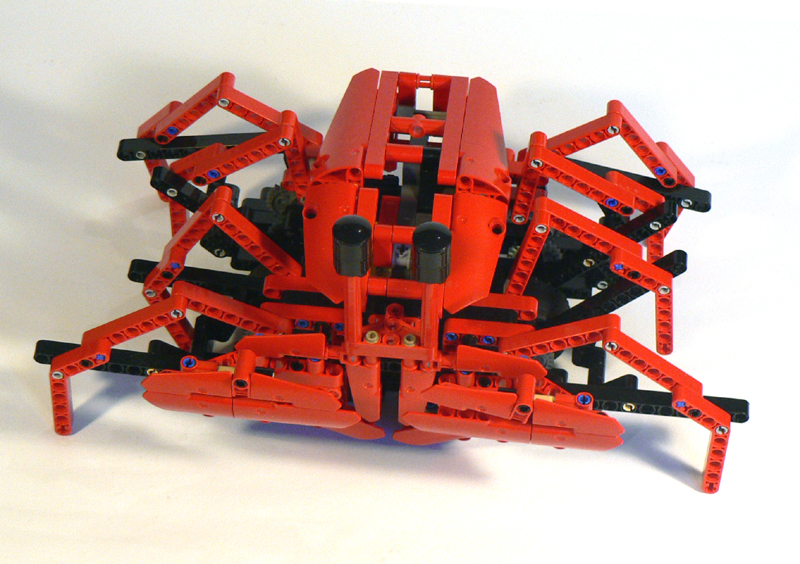
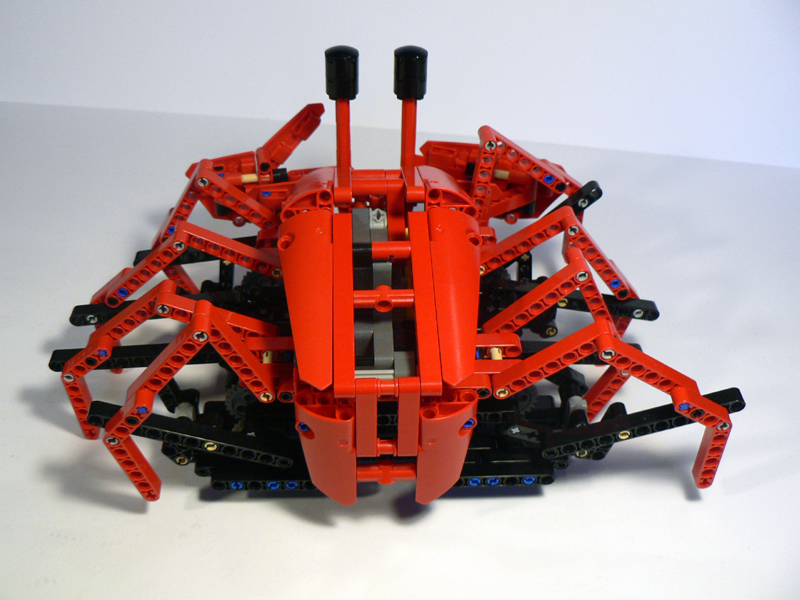
Crab
Features:- working legs
- wind up propulsion, or towing
- posable arms
Model details:
- part count: 499
- size: 18 x 31 x 15,5 cm (widest, arms retracted)
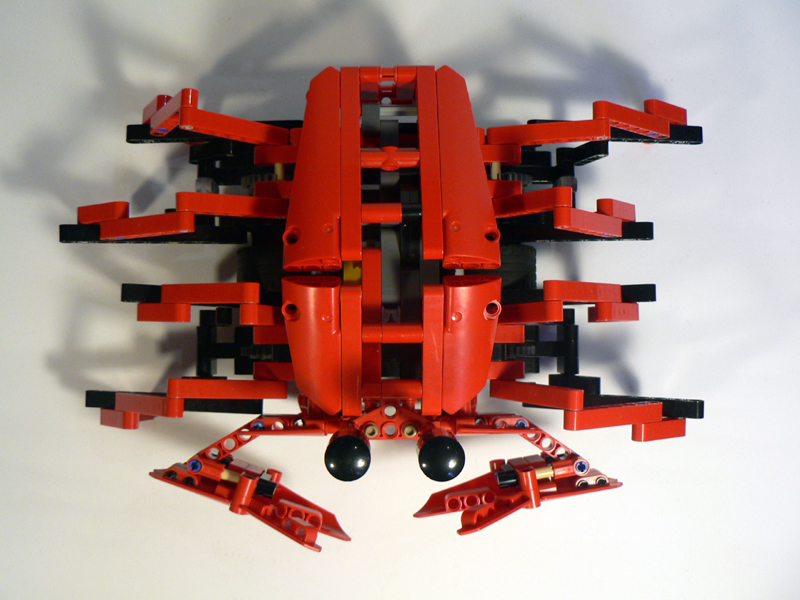
This was the most challenging of the three models because I couldn't make it walk. Most walking linkages - especially with the flimsiness of LEGO mechanisms - have slight elevation, even with many legs and good synchronization, and elevation means work/energy and pullback motors are not capable to store too much enegry.
After some research, Klann linkage was chosen as the best solution for realistic insect legs (the more traditional Jansen linkage is more suitable for horses for example).
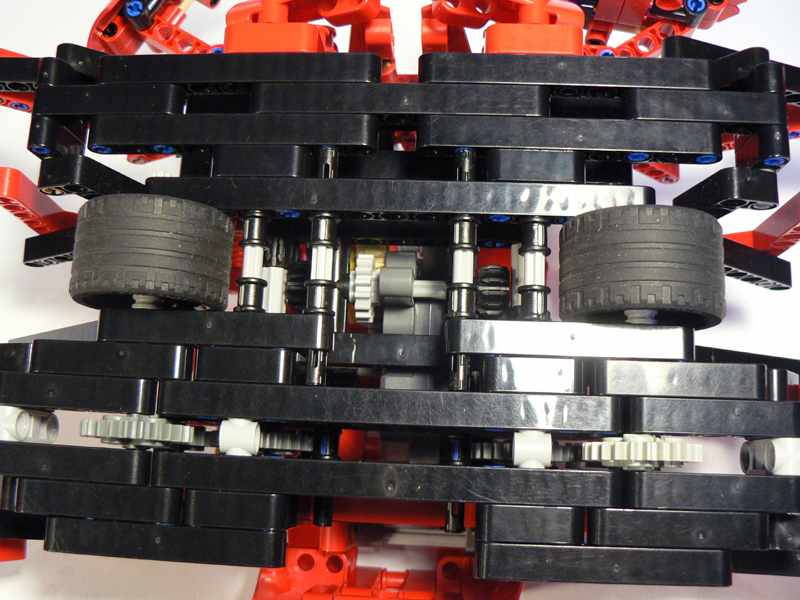
Because of the weak pullback motors, I had to use wheels to propel the model and the legs were just moving without actual effect. Luckily synchronizing the wheel and the leg motion was simple.

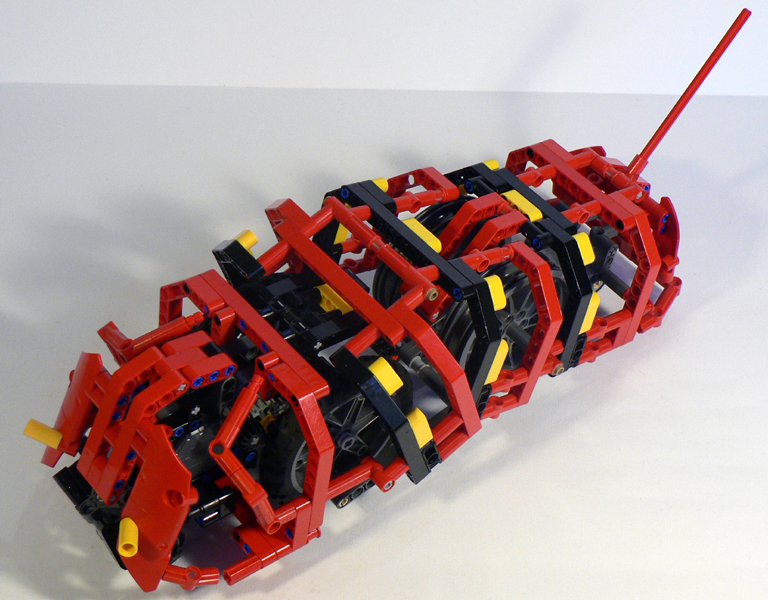
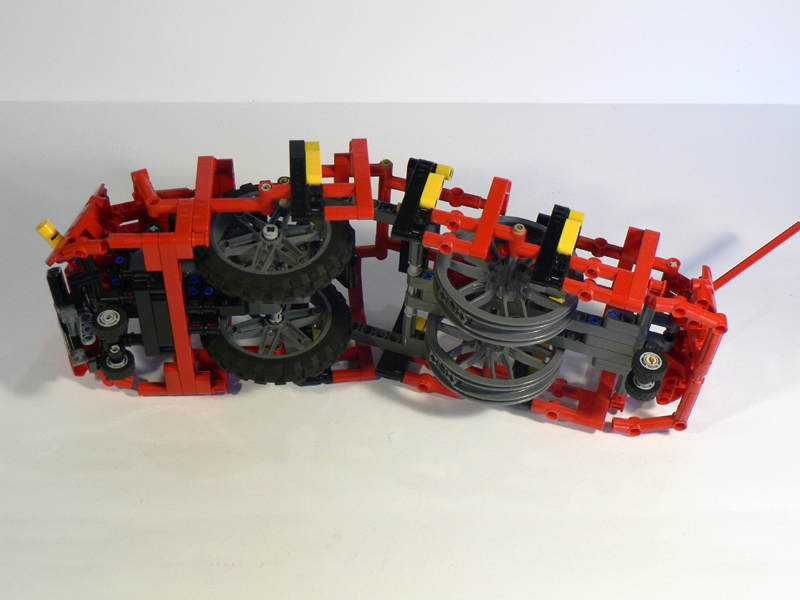
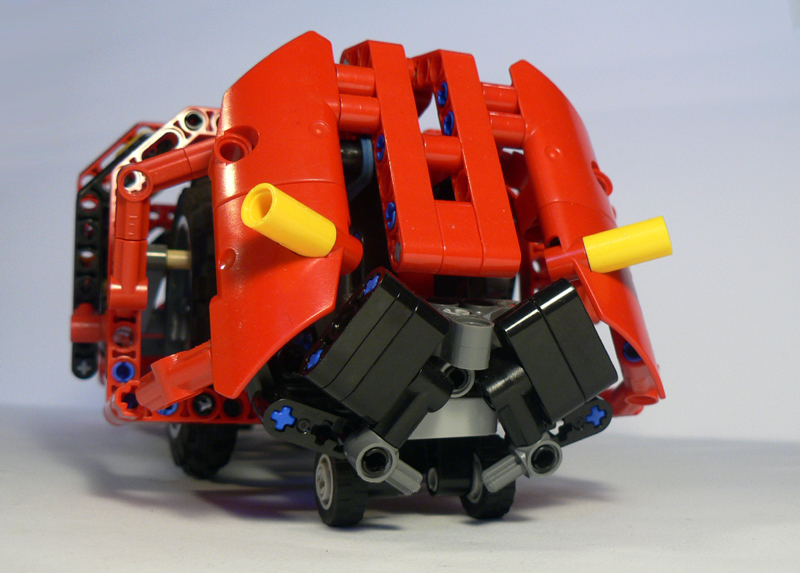
Caterpillar
Features:- crawling
- wind up propulsion, or towing
- can be rolled up
Model details:
- part count: 495
- size: 36,5 x 23,2 x 10,5 cm (without rear spike)
The biggest challenge of this model was the looks as the whole shape is basically a cylinder with some face at the front. To make a lightweight, smooth/complete and organic looking cylinder at the same time was the biggest challenge of all models considering the looks. Also the panel palette that time was much more limited, all I could come up was adding some color spots and a rear spike but surprisingly it worked fairly good.



The performance of the models were not great - especially the crab's - but it was acceptable. The crab and the caterpillar required smooth surfaces to move.
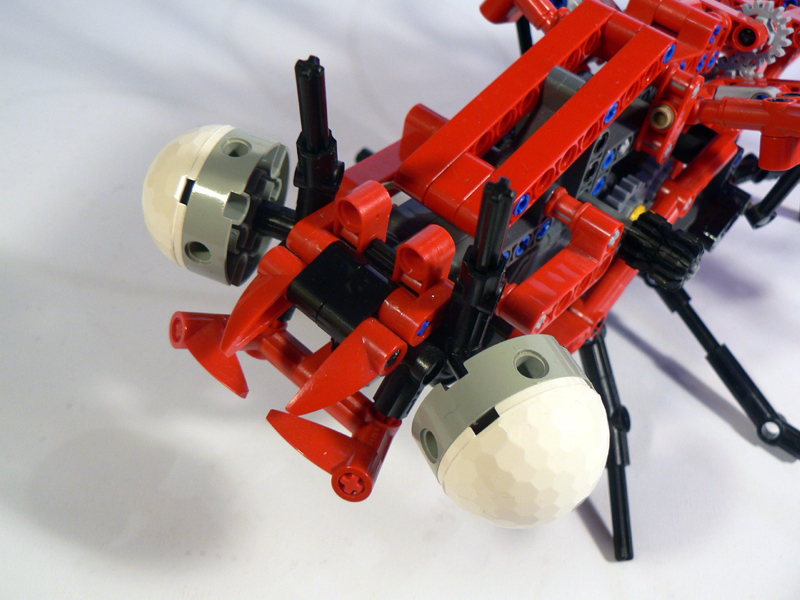
I was very satisfied with the looks, I was deliberately going for a more "realistic" grumpy bugface look instead of cartoonish design.
The entry won the contest.

External links: